그 얘기란: robotics 특히 slam 은 pose estimation 이다. pose 에는 rotation이 포함되어 있다. rotation은 nonlinear 하다. 따라서 rotation 성분에 대해서 최적화를 하기 위해서는 그것의 tangent space 인 angle-axis 에서 optimal error state 를 구해서 원래의 manifold space 에 boxplus 로 더하는 작업을 (수렴할 때까지 iterative 하게) 해주어야 한다…
하지만 pytorch 자체로는 특별히 이에 대한 작업을 기본적으로 제공해주지 않기 때문에 (그래서 quaternion을 4-dim tensor 에 담아서 그냥 backprop 해서 최적화하자~ 이러면 안된다), 기존에 python으로 pose 를 풀고 싶거나 (ceres C++를 pybind해서 써야하는 귀찮음이 있음) deep learning module 들과 pose solving 을 함께 (python에서) 물리고 싶을 때, 답답함이 있었다.
ps. 최근에 facebook 에서는 역시 동일하게 이렇게 nonlinear 한 pose 를 푸는 용도로 쓰일 수 있는 pytorch 기반의 library인 theseus 를 공개하기도 하였다.
library의 특징
Pypose 는 기본적으로 rotation에 관한 연산과 이에 대한 (pytorch기반) 미분을 지원하는 것도 특징이고
게다가 robotics 에서 자주 등장하는 문제에 대해 특화된 예제 코드도 제공하고 있는게 특징이다.
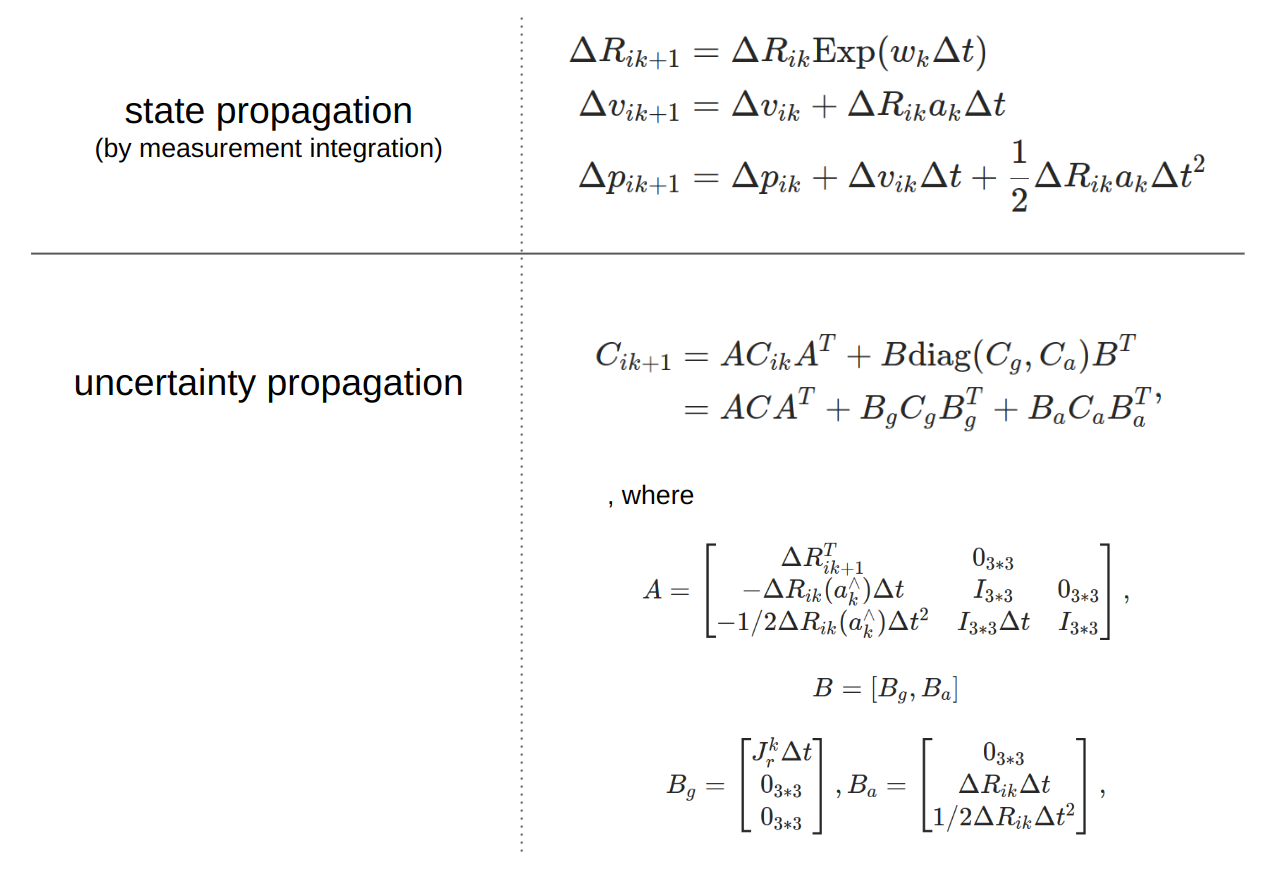
짧은 시간 $\delta t$ 사이의 gyro로부터 오는 angular velocity 와 accelerometer 로 부터 오는 linear acceleration 정보를 이용해서, 아래 수식 (출처: Pypose docs)에 의해, IMU센서의 relative pose (여기서는 position, attitude, and velocity) 를 계산하는 것을 의미한다.
note: attitude 라는 용어는 global coordinate 에서의 rotation 을 의미하는 목적으로 사용하고자 한다 (rotation이라는 단어는 relative 를 의미할 때도 자주 쓰이므로).
이렇게 얻은 relative transformation 을 직전 pose 에 계속 더해나간다면, 그것이 바로 inertial odometry라고 할 수 있겠다.
state 뿐 아니라 uncertainty 도 함께 evolve 하는 것이 특징이다.
이러한 IMU kinematics에 관한 내용에 대한 설명은 여기서는 생략하며 아래 자료를 (늘) 추천한다.
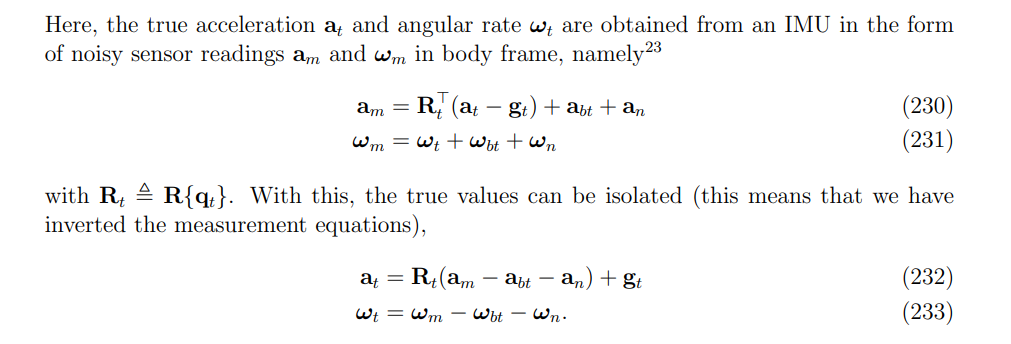
가속도값의 measurement 에는 사실 중력이 포함되어 있기 때문에, 이를 빼주어야 하고, 이를 빼주려면 현재 자세(attitude) 를 알아야 한다.
이 관계는 아래 식 230과 같이 정의된다 (출처: Quaternion kinematics for the error-state Kalman filter). $a_m$ 이 실측값 (raw measurement from a sensor) 이다. 앞서 ‘IMU integration 이란?’ 에서 소개한 imu integration 모델에 사용될 값은 true (nominal) acceleration 값 $a_t$ 이므로 식 230 의 양변을 옮기고 정리하면 식 232와 같이 된다. 즉 실측값에 현재 자세를 곱하고 중력 (좁은 수백미터 영역의 mobile robot application에서는 보통 constant로 가정) 을 더해주어야 한다.
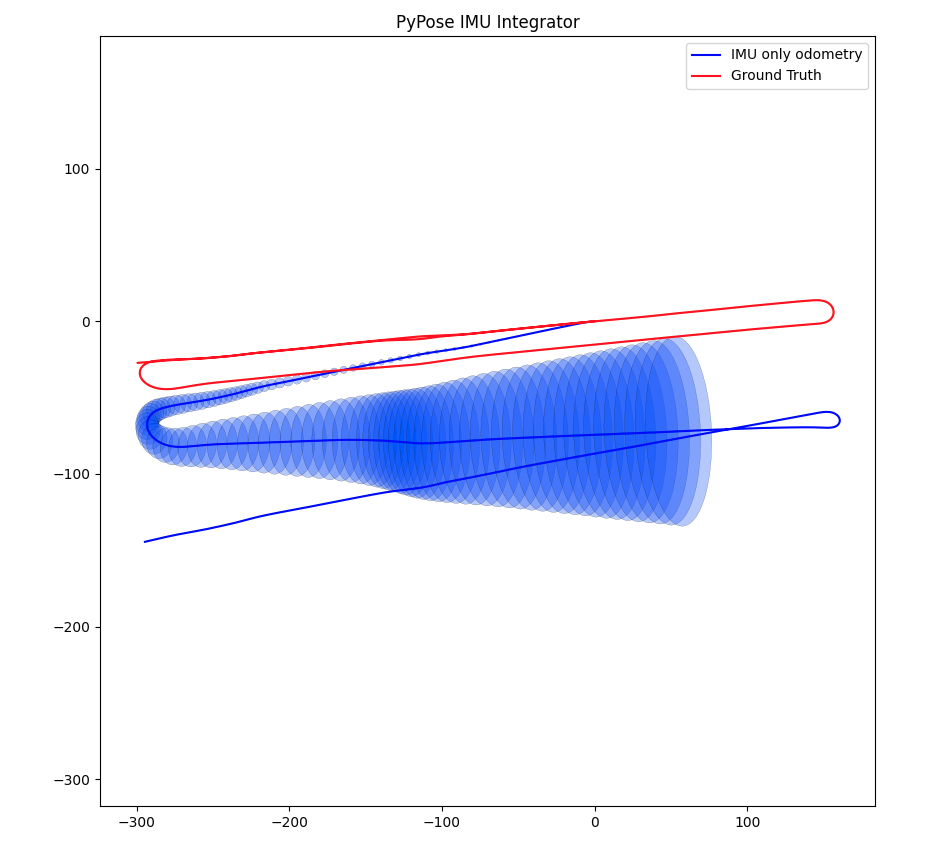
따라서 이 때 정밀한 global attitude (rotation) 을 알 고 있다면 gravity 보상을 그만큼 더 잘할테고, 그만큼 더 실제 모션에 가까운 relative transformation 을 imu kinematics model 이 계산해낼 수 있을 것이다. 좋은 인풋이 들어갔으니 좋은 아웃풋이 나오는 것. 이 때 가장 좋을 수 있는 (ground-truth global attitude를 공급하였을 때) 결과가 위의 결과 캡처라고 생각할 수 있다.
결과 (실전편)
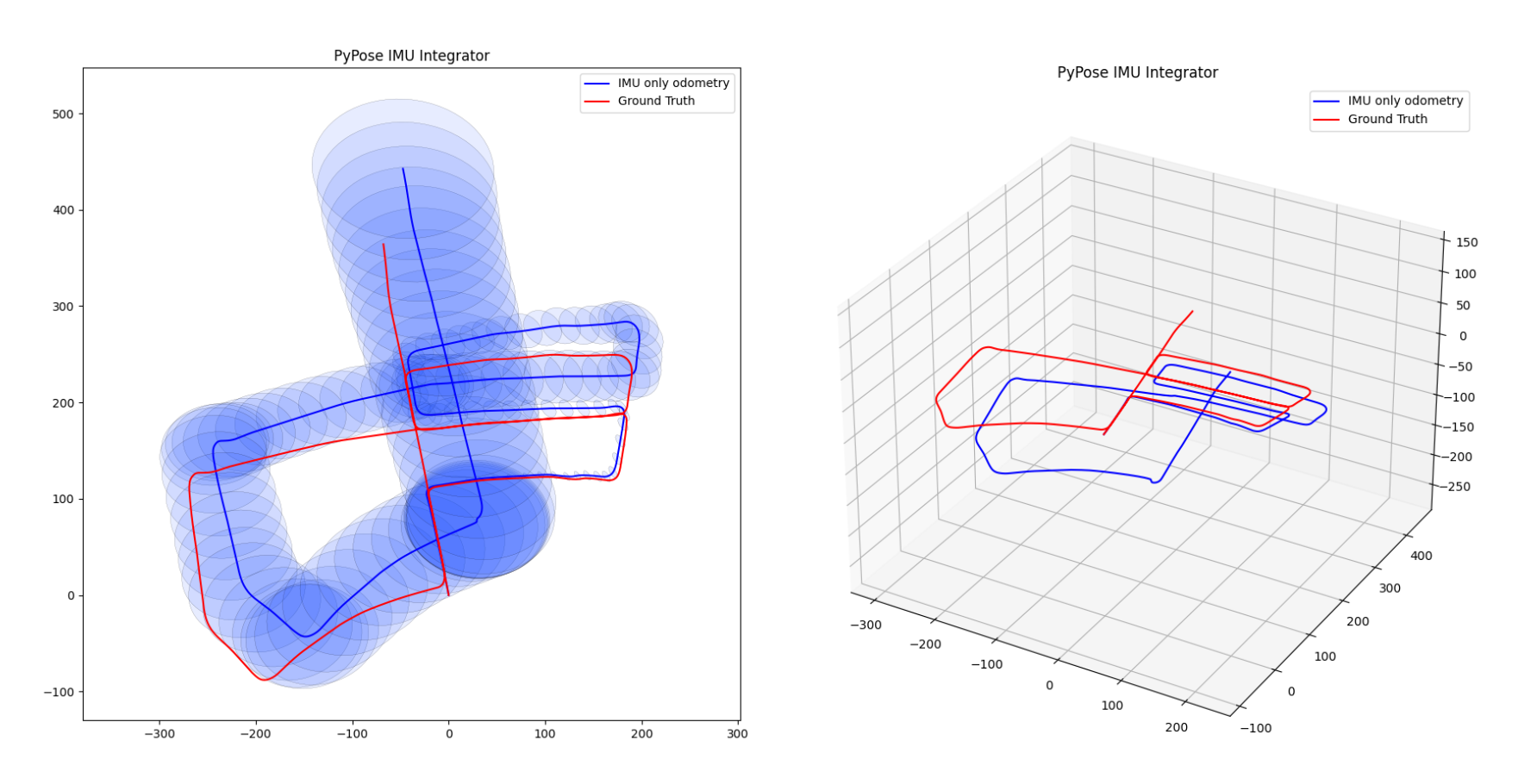
이 값이 별도로 외부에서 주어지지 않는다면, 직전 pose 의 attitude 를 사용해야 할 것이다.
그 결과는 다음과 같다.
처음에 ㄱ자 턴 정도는 따라가는가 싶더니 어느새 발산해버렸다.
레슨
이 실험을 통해서 다음 (당연한) 사실을 체감할 수 있었다.
IMU 기반의 motion propagation 을 위해서는 좋은 global rotation 이 필요하다.
IMU Only 기반의 navigation (== relative motion estimation, == odometry) 가 왜 발산하게 되는지 알게 되었다.
== 어떻게 하면 IMU Only에서도 발산을 막을 수 있는지 알게 되었다.
- 따라서 imu 센서는 짧은 시간의 drift 를 보상 (특히 global rotation) 하기 위해서 다른 센서와 융합되어야 한다!
그래서 항법쪽에는 gps-aided inertial navigation 이런 용어로 많이 연구되어 왔고, robotics 에서는 visual-inertial slam, lidar-inertial odometry, 이런 식의 용어로 많이 연구되어 왔다.
그런데 gps, camera, lidar 등의 보완센서가 imu좋은일만 시키는 것인가? 하면 그것도 아니다. 그래서 imu와 visual or lidar 의 궁합이 좋은 것이다.
visual sensor 나 lidar sensor 는 보통 10-30hz 정도이며 이는 fast motion (or highly dynamic environment such as urban sites) 에서 a big pose jump 나 data의 degradation (image 의 motion blur 또는 lidar point cloud scan의 motion distrotion) 을 유발한다. 이는 결국 front-end 에서 cost function을 만들 때, wrong correspondences 를 야기하게 되고, 결국 올바르게 relative motion cost 를 줄이지 못하고, relative motion estimation 에 결국 실패 (혹은 성능저하)하게 된다.
그런데 visual or lidar 센서가 좋은 global rotation 값을 imu에 직전까지 공급해왔다면, 빠른 모션에서도 imu 는 100-500~ hz 의 빠른 데이터를 공급하므로 짧은 시간동안에는 여전히 성능을 유지하는 (initial) relative transformation 결과를 제공해줄 수 있다. 이는 앞의 실험에서 보았듯이, KITTI 05 와 같은 긴 경로의 주행에서도 전체 trajectory 의 궤적의 모양새를 유지할 정도로 신뢰가능하다 (물론 여전히 drift는 누적되며, 짧은 시간내에서 신뢰가능하다는 것이다). 따라서 빠른 모션에서도 imu는 visual or lidar sensor 에 좋은 initial 을 공급해주게 되고, 이는 harsh 한 input data 품질에서도 강건한 correspondences를 구축할 수 있게 해주며 결과적으로 좋은 relative motion estimation 품질을 보장할 수 있다.
결국 lidar 가 보완한 imu가 다시 lidar 에게 도움을 주고 이게 다시 imu의 good integration 에 기여하고 … 의 상부상조.
결론
너무 당연한 소리 (IMU센서와 다른 exteroceptive sensor의 퓨전이 필요한 이유)를 실험까지 곁들여 가며 알아보았다.
Future works
위의 실험에서는 ground-truth global attitude 를 공급해서 저정도의 성능을 얻었지만, 실전에서 ground-truth global attitude 를 줄 수는 없다. 그래서 레슨2 에서 이야기했듯 gps, camera, or lidar 센서를 이용해서 global attitude 를 계속 잘 유지해나가는 식으로 fusion system 을 구성하게 되는데, lidar 쪽에서는 fast-lio 가 요즘 가장 유명한 예시인 듯하다.
다만 이 때의 rot 은 imu only 로 계속 쌓아가는 것이 아니라, lidar-aiding 을 통해서 계속 매 스캔마다 보정(filtering) 되는 값이기 때문에, 좋은 품질의 gravity 보정이 이루어질 것으로 기대할 수 있다 (실제로 fast lio의 데모 비디오들도 그러하고).
ps. 그런데 사실 KITTI 는 쉬운 데이터셋이라 A-LOAM 같은 코드들을 보면 IMU를 쓰지 않고 lidar 만으로도 KITTI05 와 같은 곳은 충분히 좋아보이는 odometry 결과를 보여준다. 하지만 이런 성능들은 scan to scan이 아니라 scan to map registration 과 같은 registration 쪽에서의 기법들로부터 얻어진 것들도 많다.
혹은 별도 추가센서 없이 global rotation guide 를 잘 해줄 수 있다면? 예를 들어서 자동차는 roll 과 pitch motion 이 많이 없음을 가정할 수 있다. 이런 가정들을 정량화해서 virtual measurement 로 넣어주면 발산을 늦츨 수 있을 것이다.